Helicopter Forces and MomentsOn this page we discuss the primary forces and moments that govern the motion of a traditional helicopter. Vertical Force
The dominant vertical forces acting on a helicopter are gravity (red) and thrust from the main rotor (blue). Gravity always pulls the helicopter straight down, toward the ground. Main rotor thrust opposes gravity and keeps the helicopter aloft. A pilot can vary this thrust by feathering the blades with the collective control. When the vertical component of thrust exceeds gravity the helicopter will accelerate up. Likewise, reduction in thrust causes the helicopter to accelerate down. This is how the helicopter's altitude is controlled. Notice that main rotor thrust may not act straight up – the pilot can “tilt the thrust” to push the helicopter forward, backward and/or sideways. More on that later. Other, much smaller, vertical forces may come from the horizontal stabilizer (green), tail rotor (purple), and fuselage aerodynamics. The horizontal stabilizer looks like a small wing on the tail of the helicopter. When flying at speed, aerodynamic forces typically push the stabilizer down. The tail rotor is primarily designed to provide a yaw moment, but it may be tilted (not exactly vertical) to provide a vertical force (to help the main rotor lift the helicopter). Longitudinal (forward & backward) Force
The dominant longitudinal (forward / backward) forces acting on a helicopter are fuselage drag (red) and the main rotor thrust (blue). Although most of the main rotor force is holding the helicopter up, notice that it is tilted forward slightly (in forward flight). The pilot controls that tilt so that it counters the drag on the fuselage at the desired airspeed. In hover, with negligible drag, the main rotor thrust (blue arrow) should point closer to straight up. The faster the helicopter flies, the more drag (red arrow) it will incur, and the more the pilot must tilt the main rotor thrust forward. Lateral (left & right) Force
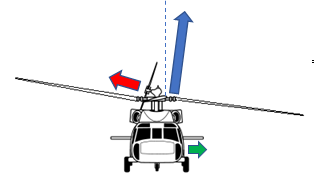
The dominant lateral force on a helicopter is the tail rotor thrust (red). The intent of the tail rotor is to provide yaw control (see yaw moment), but to do that it has this side-effect of pushing the helicopter sideways. This sideward force is countered by fuselage aerodynamics (green) and main rotor thrust (blue). Again, the main rotor thrust primarily lifts the helicopter up but, as you can see in the diagram, it may be tilted laterally by the pilot to counter the tail rotor, push the helicopter left and right and roll the helicopter. The lateral fuselage aerodynamic force is due to the helicopter flying with sideslip. If the tail rotor pushes the helicopter to the right more than the main rotor pushes to the left, the helicopter will “slip right.” The air impacting the pilot’s right side in this condition (sideward fuselage drag) will push the helicopter left. Pitch Moment
The dominant pitch moments, which govern the pitch (amount of nose up / tail down rotation) of a helicopter, are due to the main rotor and horizontal stabilizer. The fuselage aerodynamics and tail rotor provide secondary effects. At lower airspeed the horizontal stabilizer and fuselage aerodynamics are negligible. As the name suggests, the horizontal stabilizer helps stabilize pitch. When the helicopter pitches nose down, the horizontal stabilizer on the tail rises. This increases the downward aerodynamic force on the tail and lifts the nose. Analogously when the helicopter pitches nose up the tail moves down. The downward force on the stabilizer decreases, effectively pushing the nose back down. In both cases, the stabilizer opposes the pitch behavior of the aircraft. The main rotor impact on pitch consists of two distinct effects. First, the main rotor thrust may be offset from the helicopter’s center of gravity. If the thrust is in front of the center of gravity it tends to push the nose up / tail down, but if it’s behind the center of gravity it tends to push the tail up / nose down. In addition to this, the main rotor creates a pitch moment about its own center, called a “hub moment.” For example, if the blades are “flapped up” when they are over the tail and “flapped down” when passing over the nose they are trying to rotate the main rotor hub nose down. This hub moment is transferred to the helicopter as a nose down pitch moment. (Teetering and gimbaled hub types do not have this second main rotor impact – the blades are free to flap up / down with no resistance transmitted to the rest of the helicopter.) Yaw Moment
The most important helicopter yaw moments are associated with the main rotor, tail rotor, and vertical fin. The main rotor contribution here is quite different from what you’ve seen for the forces and moments above. To keep the main rotor spinning at a desirable speed, the engine / drive system applies torque to the main rotor shaft (counter-clockwise in this diagram). Physics tells us that an equal and opposite reaction torque is applied back to the helicopter. The clockwise blue arrow in the diagram represents this reaction torque. Helicopters have tail rotors specifically to resist this reaction torque. The tail rotor is placed far aft of the CG and oriented to provide a mostly lateral thrust, exactly what’s needed to efficiently create an opposing yaw moment. The red arrow in the diagram indicates the yaw moment from the tail rotor, which pushes the tail right and opposes the reaction torque to the main rotor. At high airspeeds the vertical fin (near the tail rotor) helps stabilize the helicopter’s heading (yaw angle) in a manner analogous the how the horizontal stabilizer maintains pitch. See the pitch moment section above for more information. (You may ask why we didn’t mention a torque associated with the tail rotor. Indeed, there is torque applied to the tail rotor shaft to keep it spinning, and that contributes a pitch moment to the helicopter. That moment is much smaller though, especially compared to the other sources of pitch moments.) Roll Moment
The dominant roll moments exerted on a helicopter are due to the tail rotor and main rotor. The vertical location of the tail rotor is typically above the helicopter’s CG, so that it’s lateral thrust (left in the diagram) pushes the upper portion of the helicopter left, rolling it left side down as shown by the red arrow. The main rotor counter’s the roll moment due to the tail rotor to keep the helicopter upright. The main rotor thrust is normally tilted slightly (right in the diagram) so that the main rotor thrust produces an opposing roll moment. However, there are two more roll moments associated with the main rotor. One is a main rotor hub moment. This is analogous to what was described in the pitch moment section above, just in the roll direction instead of the pitch direction (blades flapping up on the pilots right side and down on his left side create a moment about the hub). The other is the torque applied to the main rotor. As described in the yaw section, an equal and opposite torque is applied back to the helicopter. Since the main rotor shaft is tilted slightly forward (to help propel the helicopter forward), this torque generates a roll moment too (though much less than the yaw moment). SummaryThe main rotor lifts the helicopter. By tilting the main rotor the pilot can control pitch, roll and forward/lateral speed. To keep the main rotor spinning a torque is applied to its shaft, which creates an undesirable yaw moment that would spin the helicopter in the opposite direction. The tail rotor exists to stop that spin and control yaw behavior. At larger airspeeds the fuselage, horizontal stabilizer, and fin produce larger forces and moments. The fuselage drag is opposite to the direction of motion. The horizontal stabilizer primarily contributes a pitch moment and keeps the pitch attitude more stable. Similarly, the vertical fin primarily contributes yaw moment and keeps the yaw attitude more stable. |