SpinningWing > Helicopters > Helicopter Components > Helicopter SAS and SCAS
Helicopter SAS and SCASIn this article, we discuss the SAS and SCAS included in many modern helicopters. These systems improve helicopter stability, mitigating the effects of turbulence and gusts. This reduces pilot control workload, freeing them to focus on communication, navigation, and other tasks. If you're looking for a high-level book on helicopter control, we recommend Prouty's Helicopter Performance, Stability, and Control. What does a SAS do?SAS stands for stability augmentation system. It stabilizes a helicopter against pitch and roll disturbances due to wind gusts and turbulence. Modern systems include yaw as well and are sometimes called “three-axis systems.” The earliest helicopters had stability augmentation provided by mechanical systems. The most notable may be the “stabilizer bar” on the Bell 47. These approaches fell out of favor as electronics and hydraulics became cheaper, lighter, and more reliable. Newer systems described herein facilitate autopilot and flight director functionality as well. Modern systems include sensors to measure angular velocity and other values. For example, a “pitch gyro” may measures pitch rate. The measured rate is converted into a desired pitch actuator movement. This may be a simple multiple of the measured rate. The pitch actuator moves the control rod that tilts the swashplate, countering the undesired pitch rate, as a pilot would. Example: A pitch disturbanceConsider a helicopter in hover. A sudden, head-on gust causes the main rotor to flap back and the helicopter to pitch nose up. The SCAS pitch gyro reports this motion to a computer, which commands an actuator to apply forward cyclic. The cyclic input reduces, but does not eliminate, the disturbance. The behavior is analogous to a lateral gust generating a roll: the roll gyro signal will cause a computer to command a lateral cyclic, countering the roll. How does a SCAS differ?SAS has a major weakness. What if the pitch movement was intentional—the pilot moved the cyclic to command a nose up pitch? SAS can’t distinguish this pitch movement from an unintended movement due to a gust! SAS will move the swashplate to counter this pitch, working against the pilot. This requires the pilot to move the control even more and results in a sluggish control feel. (This problem exists in all axes.) A SCAS system fixes this problem. A control motion transducer (CMT) monitors the pilot’s cyclic stick positions (and pedal for a three-axis system). If the pilot pulls the cyclic aft, then a command is sent to the SAS/SCAS actuator to help the helicopter pitch up. The movement is typically more than the reverse movement generated by the SAS, and hence it amplifies the pilot's control input, whereas the SAS reduced the control input. Hardware overviewThe hardware required for SAS/SCAS include the gyros/sensors, the actuator, a hydraulic system, and potentially a control motion transducer (CMT). The latter is only necessary for a SCAS; it’s not required for a SAS. The CMT is typically located below the control stick. This transducer converts stick movement to an electrical signal. This signal is output from the CMT to the controller/computer, as shown in the diagram below. 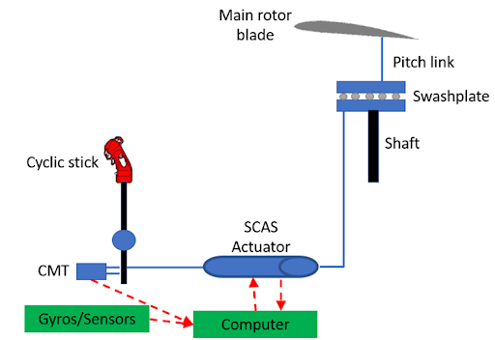 The computer also receives input from gyros/sensors. Using this information, the computer sends a signal to command actuator movement. The SCAS actuator is placed “in series” with the pilot control. This means it adds/subtracts to the pilot control movement; it does not move the pilot control stick. The actuator is powered by the hydraulic system of the aircraft. A computer may command an increase/decrease in pressure to move a piston out/in from the actuator case. This piston moves the control rod to add/subtract from the pilot control movement. The piston is mechanically limited to a certain range. Typically, it can only move the control rod about 8 to 20% as far as the pilot’s stick can. This allows the pilot to “override” the SCAS if it malfunctions. (Each axis may have a different limit, i.e. the roll SCAS may be able to move 18% of full stick throw while pitch can move 10% of full throw.) To be useful, the actuator (and computer) must react quickly. Excessive delay between disturbance and SAS-commanded swashplate movement can worsen handling qualities. WashoutLet’s reconsider the pitch disturbance discussed above—a pilot in hover gets hit by a gust head on. The SCAS actuator moves to counter this disturbance. Now another head on gust hits, and later another one. Given its limited range, the SCAS actuator will eventually reach its most extreme position. This is usually referred to as saturation. The SCAS can’t react to another head on gust! Perhaps worse, the aircraft reaction to a gust is dependent on the history of its flight, specifically the actuator position. To reduce actuator saturation, the system will slowly command the actuator back to the center position in a process called washout. Ideally, the actuator will be centered and ready for the next disturbance. MalfunctionsAdding a SCAS to a helicopter introduces new potential failures. Unintended movement of SCAS actuators cause pitch/roll/yaw motion that may confuse a pilot, cause loss of control and even a deadly crash. Unfortunately, there are several ways this could happen. Engineers work to minimize the probability and severity of these failures. Some malfunctions and solutions are listed below. SCAS Failures
Workarounds
Off-axis responsesPilot control movements typically have off-axis effects. For example, lateral cyclic movement will generate smaller yaw and pitch responses (in addition to the primary roll response). These off-axis responses are often undesirable, and the pilot must manually account for them by moving other controls. SAS and SCAS reduce these off-axis responses and make the helicopter easier to fly, further reducing pilot workload. Other informationModern SCAS as described above facilitates other, higher level functionality. By incorporating sensors that measure the aircraft attitude, a system can be made to hold attitude. Recall, the SCAS only counters rates, it does not attempt to return the aircraft to the original attitude after a disturbance. Higher level system can be made to hold airspeed, altitude, climb rate and other parameters of interest. Even higher-level systems, so-called flight directors, can leverage this functionality to fly to waypoints and even partially automate landing. |